A mecânica é uma área da física e da engenharia, que lida com a análise das forças que agem sobre um objeto. Seja para a manutenção deste ou de uma estrutura em um ponto fixo, como a descrição e a causa do movimento do mesmo.
Assim, a Cinesiologia deve ser capaz de aplicar leis e princípios básicos de mecânica a fim de avaliar as atividades humanas. Essa aplicação da mecânica cai nos domínios da Biomecânica que pode ser definida como aplicação da mecânica aos organismos vivos, tecidos biológicos, aos corpos humanos e animais.
A postura do corpo é resultante de inúmeras forças musculares que atuam equilibrando forças impostas sobre o corpo, e todos os movimentos do corpo são causados por forças que agem dentro e sobre o corpo.
Em nossas atividades diárias, no trabalho, no esporte, temos que lidar com forças e os profissionais que trabalham com lesões músculo-esqueléticas precisam compreender como as forças afetam as estruturas do corpo e como estas forças controlam o movimento.
A biomecânica é a base da função músculo-esquelética. Os músculos produzem forças que agem através do sistema de alavancas ósseas. O sistema ósseo ou move-se ou age estaticamente contra uma resistência. O arranjo de fibras de cada músculo determina a quantidade de força que o músculo pode produzir e o comprimento no qual os músculos podem se contrair. Dentro do corpo, os músculos são as principais estruturas controladoras da postura e do movimento. Contudo, ligamentos, cartilagens e outros tecidos moles também ajudam no controle articular ou são afetados pela posição ou movimento.
1. CENTRO DE GRAVIDADE
A Gravidade é uma força externa que age sobre um objeto sobre a terra, e para equilibrar essa força, uma segunda força externa precisa ser induzida - ou seja, todo o corpo recebe a ação de uma força, reage à mesma com uma força igual e oposta.
O conceito de Centro de Gravidade é proveitoso ao descrever e analisar mecanicamente o movimento do corpo humano e outros objetos, sabendo exatamente como a força da gravidade atua nesses corpos.
O Centro de Gravidade é o ponto dentro de um objeto onde se pode considerar que toda a massa, ou seja, o material que constitui o objeto, esteja concentrada. A gravidade puxa para baixo todo ponto de massa que constitui este objeto ou o corpo. No entanto, a determinação do Centro de Gravidade do corpo humano é muito difícil, pois este não apresenta densidade uniforme, não é rígido e não é simétrico enquanto um objeto com todas estas características o Centro de Gravidade em cada ponto é igual.
Existem cálculos matemáticos que analisam parte a parte o centro de gravidade de um corpo não uniforme, de forma a adquirir um resultado médio do centro de gravidade do mesmo.
2. LINHA GRAVITACIONAL
A localização do Centro de Gravidade do corpo como um todo varia, dependendo da posição do corpo. Numa pessoa ereta, pode-se situá-lo de forma aproximada sobre uma linha, formada pela interseção de um plano que corta o corpo em duas metades, uma direita e uma esquerda, e um plano que corta o corpo em metade anterior e posterior. A posição do ponto do Centro de Gravidade ao longo desta linha imaginária, pode-se considerar que a gravidade atua sobre esse único ponto de Centro de Gravidade, puxando diretamente para baixo em direção ao centro da terra. Essa linha ou direção de tração é a linha de gravidade.

3. BASE DE SUSTENTAÇÃO
A base de sustentação, ou a base de apoio para o corpo é a área formada abaixo do corpo pela conexão com a linha continua de todos os pontos em contato com o solo. Na posição ereta, por exemplo, a base de apoio é aproximadamente um retângulo, formado por linhas retas através dos dedos, formado por linhas retas através dos dedos e calcanhares e ao longo dos dedos de cada pé. Quando um corpo está numa posição fixa com a linha de gravidade passando através da base de apoio, diz-se que ele está compensado, estável ou em equilíbrio estático. Se a linha de gravidade passar fora da base de apoio, o equilíbrio e a estabilidade são perdidos e os membros apoiadores devem mover-se para evitar uma queda. Essa situação ocorre continuamente, quando andamos, corremos e mudamos de direção.
4. FORCAS QUE ATUAM NO MOVIMENTO
A Ciência mecânica diz que uma força pode ser definida simplesmente como um empurrão ou tração. Por definição a força é uma entidade que tende a produzir movimento. Às vezes, o movimento não ocorre ou o objeto se acha em equilíbrio. O ramo da mecânica que lida com este fenômeno é a estática; caso haja o movimento, é chamado dinâmica.
A força é definida por quatro características básicas:
- magnitude de força;
- direção;
- sentido; e
- quantidade de tração.
As forças mais comuns envolvidas com a biomecânica são: a força muscular, gravitacional, inércia, de flutuação e força de contato. A força produzida por músculos depende de vários fatores. Dois desses fatores incluem velocidade de contração do músculo e comprimento do músculo. O peso de um objeto é resultado da força gravitacional.
O conceito de inércia mantém que um corpo permanece em repouso ou em movimento uniforme até receber a ação de uma força externa.
A força de flutuação tende a resistir à força da gravidade. Na água a magnitude dessa força equivale ao peso de água que o objeto desloca. A força de contato existe toda vez que dois objetos se acharem em contato um com o outro. Esse tipo de força pode ser uma força de reação ou uma força de impacto. A força pode ser ainda subdividida em uma força normal perpendicular às superfícies de contato e uma força de fricção ou atrito que é paralela à superfície de contato.
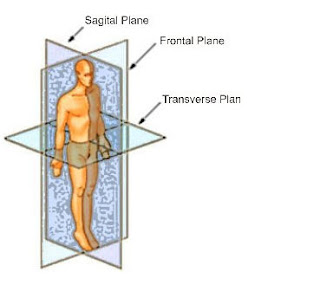
5. PLANOS E EIXOS
Planos de ação são linhas fixas de referencia ao longo das quais o corpo se divide. Há 3 planos e cada um está em ângulo reto ou perpendicular com dois planos.
O plano frontal passa através do corpo de lado a lado, dividindo-o em frente e costa. É também chamado plano coronal. Os movimentos que ocorrem neste plano são abdução e adução.
O plano sagital passa através do corpo da frente para trás e o divide em direita e esquerda. Pode-se pensar nele como uma parede vertical cuja extremidade se move. Os movimentos que ocorrem neste plano são flexão e extensão.
O plano transverso passa horizontalmente pelo corpo e o divide em parte superior e inferior. É também chamado plano horizontal. Neste plano, ocorre a rotação.
Sempre que um plano passa pela linha média de uma parte, esteja ela no plano sagital, frontal ou transverso, está se referindo ao plano cardinal, porque divide o corpo em partes iguais. O pondo onde os três planos cardinais se encontram é o centro de gravidade. No corpo humano este ponto é, na linha média, mais ou menos ao nível da segunda vértebra sacra, ligeiramente anterior a ela.
Os eixos são pontos que atravessam o centro de uma articulação em tomo da qual uma parte gira. O eixo sagital é um ponto que percorre a articulação de frente para trás. O eixo frontal vai de lado a lado e o eixo vertical, também chamado longitudinal, vai da parte superior à inferior.
O movimento articular ocorre em torno de um eixo que está sempre perpendicular a um plano. Outro modo de se descrever este movimento articular, é que ele ocorre sempre no mesmo plano e em tomo do mesmo eixo. Por exemplo, flexão/extensão ocorrerá sempre no plano sagital em tomo do eixo frontal e a adução em tomo do eixo sagital. Movimentos semelhantes como o desvio radial e ulnar do punho também ocorrerão no plano frontal em tomo do eixo sagital.
6. TIPOS DE MOVIMENTO
Movimento linear, também chamado movimento translatório, ocorre mais ou menos em uma linha reta, de um lugar para outro. Todas as partes do objeto percorrem a mesma distancia, na mesma direção e ao mesmo tempo. Se este movimento ocorrer em linha reta é chamado movimento retilíneo. Se este movimento ocorre numa linha reta mas em uma forma curva, é chamado curvilíneo.
O movimento de um objeto em tomo de um ponto fixo é chamado movimento angular, também conhecido como movimento rotatório. Todas as partes do objeto movem-se num mesmo ângulo, na mesma direção, ao mesmo tempo. Elas não percorrem a mesma distância.
Falando de um modo geral, a maioria dos movimentos do corpo é angular, enquanto os movimentos feitos fora da superfície corporal tendem a ser lineares. Exceções podem ser encontradas. Por exemplo, o movimento da escápula em elevação/depressão e pronação/retração é essencialmente linear. Todavia, o movimento da clavícula, que é fixada à escápula, é angular e realizado através da articulação extraclavicular.
7. MOVIMENTOS ARTICULARES
As articulações movem-se em direções diferentes. O movimento ocorre em tomo de um eixo e de um plano. Os termos a seguir são usados para descrever os vários movimentos que ocorrem numa articulação sinovial. A articulação sinovial é uma articulação móvel livre, onde a maioria dos movimentos articulares ocorrem.
- Flexão: é o movimento de dobra de um osso sobre o outro causando uma diminuição do ângulo da articulação.
- Extensão: é o movimento que ocorre inversamente à flexão. É o endireitamento de um osso sobre o outro, causando aumento do ângulo de articulação. O movimento, geralmente, traz uma parte do corpo à sua posição anatômica após esta ser flexionada. A hiperextensão é a continuação da extensão, além da posição anatômica.
- Abdução: é o movimento para longe da linha média do corpo e adução é o movimento de aproximação da linha média do corpo. As exceções a esta definição de linha média são os dedos e os artelhos, onde o ponto de referência para os dedos é o dedo médio. O movimento para longe do dedo médio abduz, mas aduz somente como um movimento de volta da adução. O ponto de referência dos artelhos é o segundo artelho. Semelhante ao dedo médio, o segundo artelho abduz da direita para a esquerda, mas não abduz a não ser como movimento de volta da adução.
- Circundução: é a combinação de todos esses movimentos numa seqüência em que a parte da extremidade faz um grande círculo no ar, enquanto as partes próximas à extremidade proximal fazem um círculo pequeno.
- Rotação: é o movimento de um osso ou parte dele em torno de seu eixo longitudinal. Se a superfície anterior se move em direção à linha média, é chamado medial ou rotação interna. Se a superfície anterior se movimenta para longe da linha média, este movimento é chamado rotação lateral ou externa. Alguns termos são usados para descrever movimentos específicos de certas articulações, como:
- Pronação: é o movimento ao longo de um plano paralelo ao solo e para longe da linha média e retração é o movimento no mesmo plano em direção à linha média. Ainda existem alguns termos como desvio ulnar e radial, para se referir à adução e abdução do punho.
- Inclinação lateral: quando se refere ao tronco que se move para a direita ou para a esquerda.
8. TIPOS DE CONTRAÇÕES MUSCULARES
Há três tipos básicos de contrações musculares:
- Isométrica;
- Isotônica concêntrica; e
- Isotônica excêntrica.
Uma contração isométrica ocorre quando o músculo se contrai, produzindo força sem mudar o seu comprimento. O músculo se contrai mas nenhum movimento ocorre. O ângulo da articulação muda.
Uma contração isotônica pode ser dividida em concêntrica e excêntrica. Uma contração concêntrica ocorre quando há movimento articular, o músculo diminui e as fixações musculares se movem em direção uma da outra.
Uma contração excêntrica ocorre quando há movimento articular, mas o músculo parece alongar, quer dizer, as extremidades se distanciam.
8.1. CONTRAÇÕES CONCÊNTRICAS
1- Fixações musculares se movem juntas, em direção uma da outra.
2- O movimento se faz contra a gravidade.
3- Se o movimento acontece com gravidade, o músculo está usando uma força maior do que a força da gravidade.
8.2. CONTRAÇÕES EXCÊNTRICAS
1- As fixações musculares se movem para longe uma da outra.
2- 0 movimento ocorre com gravidade.
9. SISTEMA DE ALAVANCAS
Uma alavanca é uma barra rígida que gira em torno de um ponto fixo quando uma força é aplicada para vencer a resistência.
Uma quantidade maior de força ou um braço de alavanca mais longo aumentam o movimento de força.
Há três classes de alavancas, cada uma com uma função e uma vantagem mecânica diferente.
Diferentes tipos de alavancas também podem ser encontradas no corpo humano. No corpo humano, a força que faz com que a alavanca se mova, na maioria das vezes e muscular. A resistência que deve ser vencida para que o movimento ocorra, inclui o peso da parte a ser movida, gravidade ou peso externo. A disposição do eixo em relação à força e a resistência vão determinar o topo de alavanca.
9.1. CLASSE DAS ALAVANCAS

9.1.1. Alavanca de Primeira Classe (interfixa)
O eixo (E) está localizado entre a força (F) e a resistência ( R).
9.1.2. Alavanca de Segunda Classe (inter-resitente)
O eixo (E) em uma das extremidades, a resistência ( R) no meio e a força (F) na outra extremidade.
9.1.3. Alavanca de Terceira Classe (inter-potente)
Tem o eixo numa das extremidades, a força no meio, a resistência na extremidade oposta.
A alavanca de 3ª classe é a mais comum das alavancas do corpo. Sua vantagem é a extensão do movimento.
10. TORQUE
Se for exercida uma força sobre um corpo que possa girar em torno de um ponto central, diz-se que a força gera um torque. Como o corpo humano se move por uma série de rotações de seus segmentos, a quantidade de torque que um músculo desenvolve é uma medida muito proveitosa de seu efeito.
Para empregar o valioso conceito de torque, devem-se compreender os fatores relacionados à sua magnitude e as técnicas para seu cálculo. A magnitude de um torque está claramente relacionada à magnitude da força que o está gerando, mas um fator adicional é a direção da força em relação à posição do ponto central. A distância perpendicular do pivô à linha de ação da força é conhecida como braço de alavanca da força. Um método para calcular o torque é multiplicar a força (F) que gerou pelo braço de alavanca (d).
T = F x d
11. TRABALHO E ENERGIA
Quando a força de um objeto está relacionada com a localização do objeto, os princípios de trabalho e energia se tornam importantes. Em mecânica, o trabalho refere-se ao produto de forças exercidas sobre um objeto e o deslocamento do objeto paralelo ao componente de força de resistência do objeto.
Trabalho (W) = Força (F) x Distância (d).
O trabalho é realizado na medida em que a força vence uma resistência e move o objeto em uma direção paralela ao componente de força de resistência.
Energia é a capacidade de fazer trabalho. Existem muitas formas de energia, dentre elas a energia mecânica e o calor. O calor é geralmente considerado subproduto de outras formas de energia ou resulta quando uma forma de energia se transforma em outra. Um aumento de calor ocorre quando moléculas de área aquecida aumentam sua quantidade de movimento.
A energia mecânica pode ser dividida em dois tipos: energia potencial e cinética. A energia potencial é a energia armazenada. Possui o potencial para ser liberada e tornar-se energia cinética, que é a energia de movimento.
12. EXEMPLO DE UMA ALAVANCA HUMANA:
12.1. A Articulação do Quadril
A articulação do quadril é uma articulação esferóide. É formada pelo encaixamento da cabeça do fêmur no acetábulo do osso do quadril.

12.1.1. Movimentos articulares
A despeito da estabilidade inerente proporcionada à articulação por sua arquitetura e sustentação ligamentosa, a articulação do quadril demonstra um alto grau de mobilidade. Os movimentos permitidos pelo quadril, descritos com referência ao fêmur, incluem a flexão e extensão no plano sagital, abdução e adução no plano frontal e rotação medial e lateral no plano transversal.
O posicionamento do corpo do fêmur, por meio do colo femural, a uma certa distância da pelve óssea, ajuda a prevenir restrições à amplitude movimento de articulação do quadril que poderiam resultar de colisão. O ângulo colo-corpo permite que o corpo do fêmur se posicione mais lateralmente em relação à pelve. No plano frontal, com referencia ao eixo longitudinal do fêmur, o ângulo colo-corpo normal é de aproximadamente 125º. A deformidade na qual o ângulo é maior, denominada coxa vara, e a deformidade na qual o ângulo é menor, denominada coxa valga, causam alterações na transmissão de forças para o fêmur e a partir dele.
Um segundo ângulo, o de anteversão, é o ângulo no qual o colo se projeta do fêmur na direção ântero-posterior. Embora haja uma grande variação entre indivíduos, o valor normal é cerca de 12º a 14º. A articulação do quadril pode mover-se independentemente do cíngulo do membro inferior, mas pode ser complementada por inclinações da pelve. A diferença do sistema aberto do cíngulo do ombro, o sistema fechado do cíngulo pélvico impossibilita movimentos no lado direito independentes do esquerdo. Na posição ereta, as aberturas superior e inferior da pelve formam ângulos com o plano horizontal, de aproximadamente 50º-60º e 15º, respectivamente.
Este ângulo denomina-se inclinação da pelve. As inclinações da pelve são rotações medidas com referência à inclinação pélvica e classificadas em relação às articulações dos quadris e lombossacral. A articulação do quadril demonstra sua maior amplitude de movimento no plano sagital, no qual se observa que a flexão pode chegar a 140º e a extensão a 15º. A abdução também pode atingir 30º e a adução um pouco menos que isto, 25º. A adução deve ser acompanhada de alguma flexão. O grau de flexão do quadril afeta a magnitude da rotação medial e lateral. Numa posição estendida, na qual os efeitos limitadores dos tecidos ligamentosos se manifestam, as amplitudes de rotação medial e lateral se reduzem para 70º e 90º, respectivamente.
e pode-se citar mais exemplos de alavancas no corpo humano ?
ResponderExcluirOlá!
ResponderExcluirLevando em consideração as alavancas no corpo humano, eu estava lendo sobre a importância da angulação da força, entretanto, não ficou claro para mim qual o efeito do ângulo de resistência. Você poderia me esclarecer?
Grata!